PLC Adhesive Control Stabilization 🎛️

Project
- Re-engineered adhesive dispensing system producing 14/28 defective glue bands
- Integrated new PLC ladder logic, HMI features, and redesigned dispensing system
Process
- Developed Toyopuc PLC ladder logic integrating a Keyence laser displacement sensor to automate adhesive height inspection, enabling in-line quality validation by faulting out sub-spec segments ( <5mm)
- Integrated new failure mode into HMI screen / buzzer to inform operator of defect without compromising cycle time
- Conducted root cause analysis to isolate failure mode (under-dispensing due to inadequate system configuration rather than bad part fit)
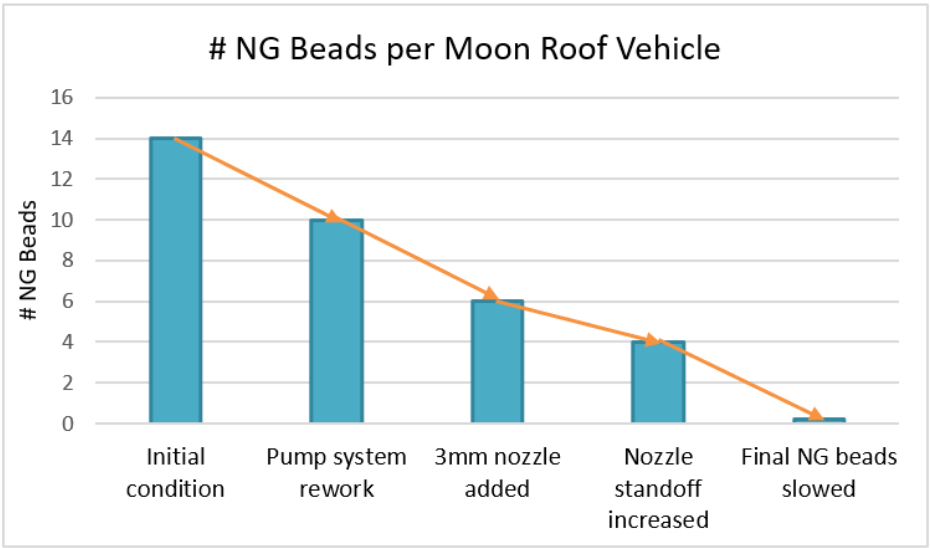
- Increased dispense volume from 30 cc → 65 cc through pump system rework, upgraded nozzle diameter (2 mm → 3 mm), & reprogrammed robot pathing (+2 mm standoff) to achieve adhesive height spec
Result
- Completely eliminated defects (14/28 → 0/28)
- Increased process robustness through automated PLC quality checks with no impact on cycle time